
横浜国立大学 渕脇研究室
-
#スマートプロダクションロボット
-
#組立
-
#実装
-
#測定・検査
-
-
#要素技術
-
#駆動・センサ・制御系
-
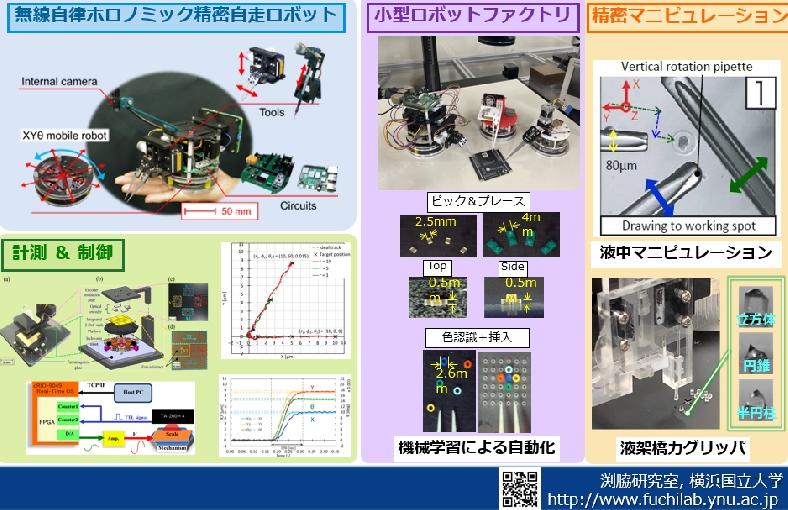
高い汎用性を持つロボット技術は多分野で自動化に貢献しているが,精密作業分野での応用は進んでいない.もしも既存機器の狭所に簡単に設置できる「超小型で高性能なロボット」を実現出来れば,組立・加工・計測・回路実装・細胞操作等の精密作業を自在に付与できるため,様々な機器の稼働率・応用範囲を大幅に拡大できるため持続可能な産業基盤の創生(SDGs9)に大きく貢献できる.
本研究室では,昆虫の多機能性・機動性を工業分野で発揮できる小型精密自走ロボットの機構・計測・制御・応用技術を創出する事でこの問題の解決を試みている


